V tomto článku si představíme princip a činnost srdíčka našich hobby CNC routerů, krokové motoru. Totiž díky své jednoduché a bezúdržbové konstrukci, poměrně vysoké přesnosti řízení a spolehlivosti se stali nejrozšířenějšími pohony pro menší robotiku. Většinou si koupíme krokový motor jako celek, takže nás bude zajímat hlavně část zapojení, ale je určitě dobré vědět základní princip jeho činnosti. Pojďme se tedy na ně podívat blíže.
Krokový motor (KM) se pohybuje diskrétně po jednotlivých krocích. Krok je mechanická odezva motoru na jeden puls napájecího obvodu. Tyto impulsy jsou do motoru dodávány řídící elektronikou, v našem případě to budou drivery (ovladače) krokových motorů, bez kterých činnost KM není možná. Tyto drivery nejsou součástí motoru. Frekvence napájecích pulsů určuje rychlost otáčení motorů (Čím více stejných signálů do motoru, tím rychleji se bude točit). Výhodou je, že mohou pracovat v otevřené smyčce (tj. nepotřebují zpětnovazební snímač pro určení polohy).
Konstrukce krokového motoru
KM se skládají ze statoru (nehybná, vnější část) a rotoru (pohyblivá vnitřní část). Na obou koncích rotoru jsou ložiska, uložena ve skříni KM.
Podle konstrukce rotoru, rozlišujeme KM na dvě základní varianty.
- KM s pasivním rotorem (Reluktanční)
- KM s aktivní rotorem
KM s pasivním rotorem
O KM s pasivní rotorem hovoříme jako o reluktančních motorech pracujících na principu změny magnetického odporu (reluktance). Rotor je tvořený zuby z feromagnetického materiálu (materiál, který se může zmagnetizovat).
Postupně přivádíme napětí do jednotlivých cívek na statoru, čímž vytvoříme magnetické pole. Takto zmagnetizované póly statoru (vinutí) si pod sebe přitáhnout jednotlivé póly rotoru (zuby). Díky malému momentu setrvačnosti má dobré dynamické vlastnosti a mívá obvykle malý krok 1º až 5º.
KM s pasivním rotorem: Na animaci je vidět jak se zub rotoru přitáhne ke zmagnetizovanému pólu statoru.
Krokové motory s aktivním rotorem
-
KM s radiálně polarizovaným permanentím magnetem
U těchto KM je rotorová část magnetického obvodu tvořena permanentním magnetem. Na obvodu rotoru se střídají severní a jižní póly, jejichž počet je poloviční než počet pólů statoru. Počet pólů statoru je dělitelný čtyřmi. Mají vyšší rozsah otáček, ale poměrně velký krok ( >15º).
KM s radiálně polarizovaným permanentím magnetem: V pravé části je diagram pulzů vedený do dvou fází pro dosažení plného kroku.
-
KM s axiálně polarizovaným permanentím magnetem
O takovýchto motorech hovoříme jako o hybridních, protože kombinují vlastnosti reluktančního KM a KM s radiálně polarizovaným permanentním magnetem. Nás tento typ motoru bude zajímat nejvíce, protože je pro aplikace hobby CNC routerů zdaleka nejpoužívanější.
Rotor motoru je tvořen hřídelí z nemagnetického materiálu, na které jsou nalisovány dva pólové nástavce složené z plechů. Mezi pólovými nástavci je uložen permanentní magnet axiálně polarizovaný (na jednom konci sever [N = North], na druhém jih [S = South]). Nástavce jsou ozubené a mají většinou 50 zubů. Vzájemně jsou vůči sobě pootočeny o půl zubu. Stator má 8 pólových nástavců, kdy každý z nich je opatřen dvěmi vinutími a jsou opatřeny drážkováním. Počty zubů statoru a rotoru nejsou stejné a obvykle se volí počet rotorových zubů větší. Fáze vinutí jsou v rytmu řídicích impulsů buzeny v předepsaném pořadí a to podle zadaného způsobu řízení. Vzniká točivé statorové magnetické pole. Rotor sleduje toto magnetické pole tak, že se vždy nejbližší zuby rotoru nastaví do magneticky klidové polohy. Při řízení bez mikrokrokování mají obvykle 200 kroků na otáčku, tedy pootočení o 1,8 stupně na krok. Nejčastněji se používají dvoufázové hybridní KM a obecně jsou nejlepší variantou pro použití u hobby CNC frézek díky jejich ceně, malému kroku a velkému momentu (jednotky až desítky Nm). Na následujícím obrázku je vidět řez modelu ve dvou pohledech. Označení součástí je následující:
A,B – přivedené fáze
1 – Hřídel z nemagnetické oceli
2 – Permanentní magnet
3,3a – Dva pólové nástavce složené z plechů
4,4a – Statorové svazky s drážkováním
5 – magneticky vodivá kostra
6 – Vinutí
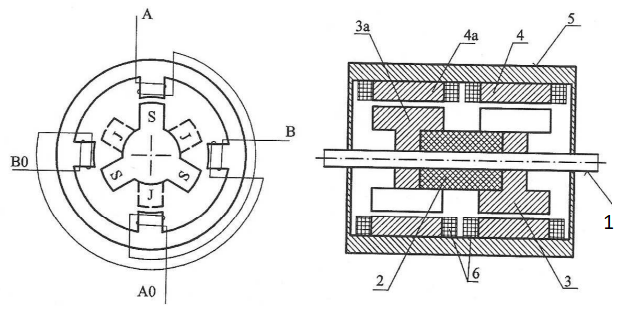
Hybridní KM v řezu

Konstrukce hybridního krokového motoru
Zapojení krokových motorů
U fázových motorů rozlišujeme dvě základní zapojení vinutí.
- Unipolární
- Bipolární
Unipolární zapojení
Při unipolárním zapojení prochází proud vždy právě jednou cívkou motoru.
Výhodou takového zapojení je menší spotřeba elektrické energie a jednodušší zapojení.
Nevýhodou je ovšem menší krouticí moment motoru.
Bipolární zapojení
Při bipolárním zapojení prochází proud vždy dvěma protilehlými cívkami a to tak,
že každá z protilehlých cívek generuje opačně orientované magnetické pole.
Výhodou takového zapojení je větší krouticí moment motoru, nevýhodou ovšem je
složitější zapojení řídicí elektroniky.
U bipolárního zapojení ještě rozlišujeme sériové a paralelní zapojení.
U sériového zapojení motor podává vysoký moment v nízkých otáčkách.
Paralelní zapojení je vhodné pro aplikace s vyššími rychlostmi.
Nejčastěji se potkáme s bipolárním motorem a poznáme ho tak, že má výstupy pro 4 vodiče. Unipolární jich má více než 4. Zde je ilustrativní schéma druhů zapojení.

Schémata zapojení KM
Mikrokrokování
Při některých aplikacích je požadováno velice jemné krokování. Úhel kroku je dán konstrukcí krokového motoru a bývá v rozmezí 0,36 až 15 stupňů. Další zmenšení kroku umožňuje metoda nazývaná „mikrokrokování“, při které je možno každý krok rozdělit na určitý počet mikrokroků stejné délky. Při standardním buzení (vysílání signálu) KM teče jednotlivými fázemi proud stejné velikosti a zub je přitahován pouze jednou cívkou. Když ale pustíme stejný proud i do sousední cívky zub se dostane mezi ně, pak hovoříme o polovičním kroku (dosáhneme dvojnásobného rozlišení motoru). Vhodnou volbou velikostí proudů v jednotlivých fázích můžeme dosáhnout libovolné rovnovážné polohy mikrokroku mezi dvěma sousedními normálními kroky. Pro naše aplikace nám budou stačit ovladače, které nám normální krok rozdělí na 8 mikrokroků, dostaneme tedy 200*8 = 1600 kroků na jednu otáčku.
{kind=link}